介绍:DORA是什么?
DORA (Dataflow-Oriented Robotic Architecture) 是一种旨在简化基于 人工智能的具身智能机器人 应用开发的框架 。其核心理念是将复杂的机器人应用程序建模为声明式的有向图,即“数据流” 。这种范式从根本上促进了系统的模块化、可配置性和可扩展性 。
为什么选择DORA
简单来说,DORA 是一个帮你搭建复杂机器人程序的“乐高积木”框架。
想象一下,你要做一个机器人,需要它能看路、能思考、能走路。传统方法可能要把所有功能代码都写在一起,非常混乱。DORA 改变了这种玩法:
-
模块化(节点
Nodes)它让你把机器人的每个功能,都拆分成一个个独立的小模块(官方叫 节点)。比如,“摄像头模块”只管看,“决策模块”只管想,“轮子控制模块”只管动。大家各司其职,互不干扰。
-
声明式数据流 (
Declarative Dataflow)你不需要告诉每个模块具体怎么一步步把数据传来传去。你只需要像画一张蓝图一样,声明清楚:“摄像头模块”的数据应该流向“决策模块”,“决策模块”处理完的结果要流向“轮子控制模块”。剩下的事,
DORA会自动帮你搞定。 -
高速数据传输
这些模块之间传递信息(比如图像、指令)的通道,是一条“超级高速公路”。它使用了高性能的
Arrow数据格式(可以理解为一种标准化的、跑得飞快的“集装箱”),确保数据交换几乎没有延迟,这对于需要快速反应的机器人至关重要。这条“高速公路”也叫 事件流 (Event Stream)。 -
管理与协调
守护进程 (
Daemon):在机器人本地,有个像“管家”一样的程序在后台运行,负责管理自己地盘上的这些功能模块(节点),确保它们正常工作。协调器 (
Coordinator):还有一个“总指挥”,它掌握着你画的那张“蓝图”,负责协调所有的“管家”,让整个系统有序地运转起来。 -
使用与开发
命令行 (
CLI):你通过一个简单的命令行工具,就能像“总指挥”下达命令一样,去启动、停止或管理整个机器人程序。API 接口 (
Language-API Bindings):如果你想自己写一个新的功能模块(比如加个“机械臂模块”),DORA允许你用 Rust、Python、C++ 等多种主流编程语言来开发,然后轻松地把它接入到整个“流水线”里。
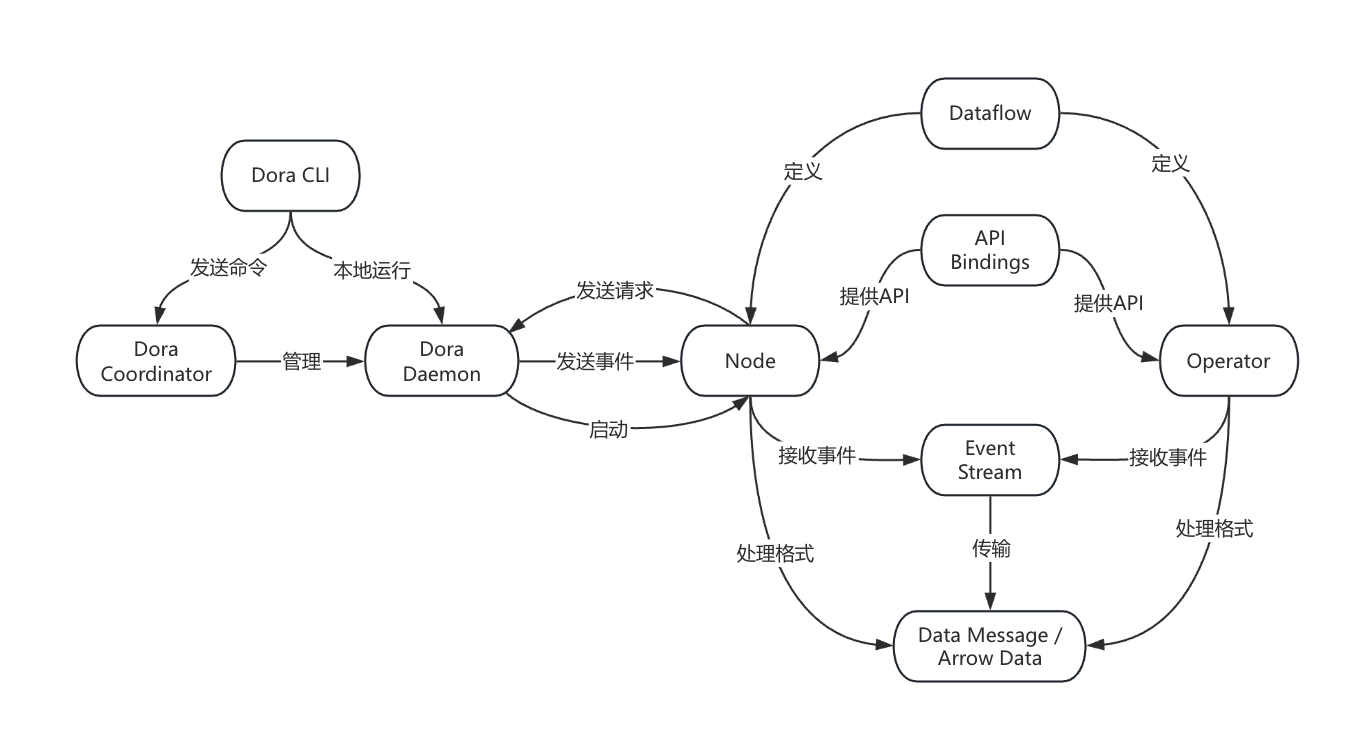
DORA流程图
![]()

Dora中文社区 © 2025 doracc.com
苏ICP备14007268号-19 |  苏公网安备32050602013520号
苏公网安备32050602013520号
本作品采用知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议进行许可